
Walking Is So Pedestrian.
The Purpose: FUN! It's a silly thing, but it also has many components that are potential products, kits or educational pieces. I wish to share the work in this project to inspire, entertain and hopefully to help. The basic chair, motors and control system have the potential to be a very inexpensive alternative to expensive manufactured assistive devices. The electronics and mechanical components have many other uses and could have potential uses in robotics, hobby projects and even art and entertainment.






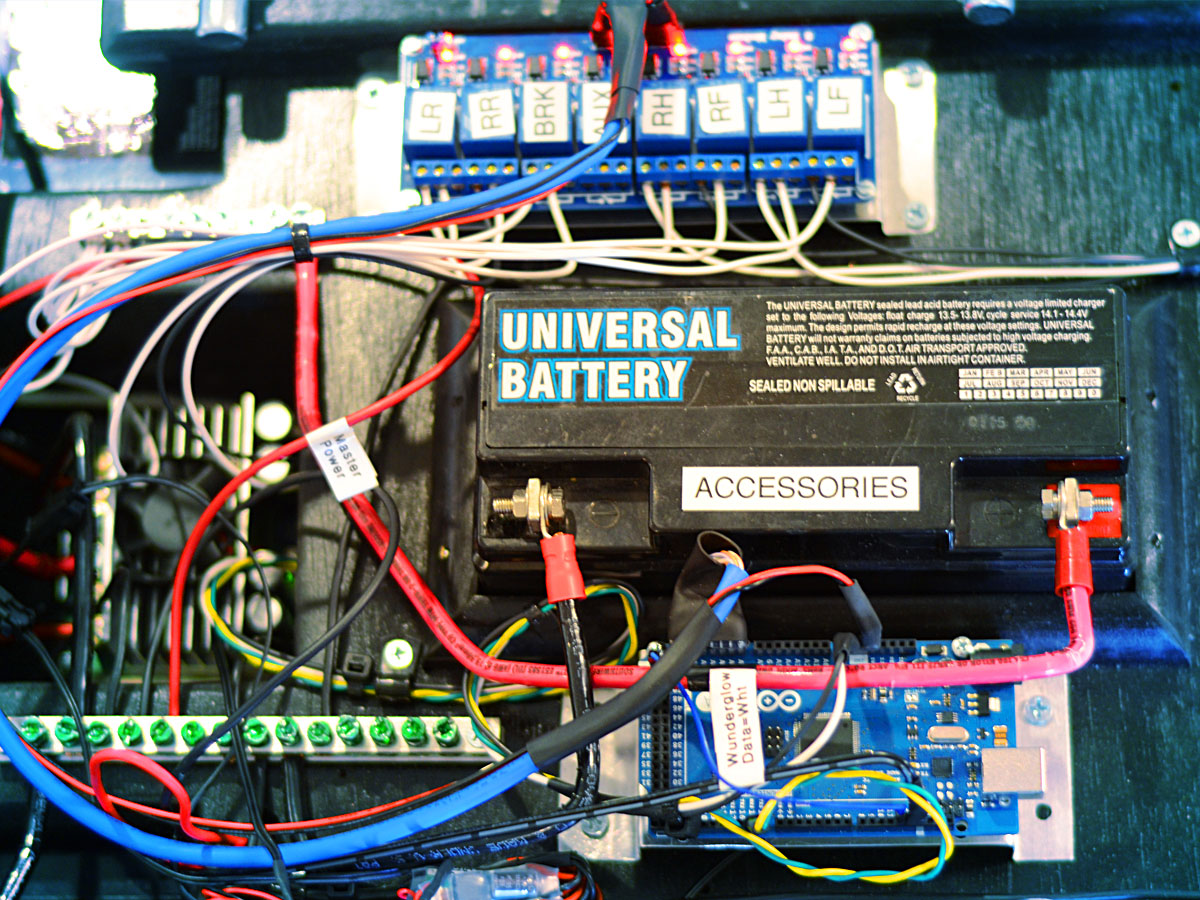



The ultra-swanky control panel and the wireless remote control for the Office Chairiot Mark II both communicate motor control and lighting commands to the chassis via the Arduino UARTs (serial ports). It's easy to do this in code and the AVR microcontrollers at the core of the Arduino boards make it trivial to do. A couple of wires and BOOM. Serial's your uncle.
However, like anything electronic, or manmade for that matter, the real world doesn't work like the blueprints say it should. Once in a while a byte or two of important motor commands from the remote controlling unit get scrambled on their way to the chassis control system and it causes unintentional things to happen, like a sudden right turn into a guy seated at a table at a demonstration of the Office Chairiot, for instance. It happened. I'm not proud. It was funny. Nobody was hurt.
I'd like to avoid having to say, "Well, at least nobody was hurt." How to do???